NODAR, the leading provider of next-generation stereo vision technology for autonomous vehicles (AVs), today announced a new capability within their Hammerhead™ product line called GridDetect, which offers long-range object detection and tracking for advanced driver assistance systems (ADAS) and AVs. Combined with Hammerhead’s ultra long-range high-resolution sensing capabilities, the product is now able to detect and track objects as far away as 350 meters and as small as 10 centimeters in height in real time.

Autonomous vehicles must be able to detect potentially dangerous objects early enough to give them time to avoid the object. As the allowable speed of AVs increases, the distance at which a self-driving vehicle must be able to detect an object increases. Data from the National Highway Traffic Safety Administration (NHTSA) helps frame this challenging requirement:
· At 55 miles per hour (88 kph), the average driver takes 0.8 seconds to perceive an obstacle ahead, and the vehicle covers 37 meters during that time
· It takes another 0.8 seconds for the driver to brake, while the still-moving vehicle travels another 37 meters
· On dry pavement, the vehicle takes 4.5 seconds to slow down and stop, traveling another 44 meters
· In all, the driver needs 118 meters to stop the vehicle while traveling at 88 kph
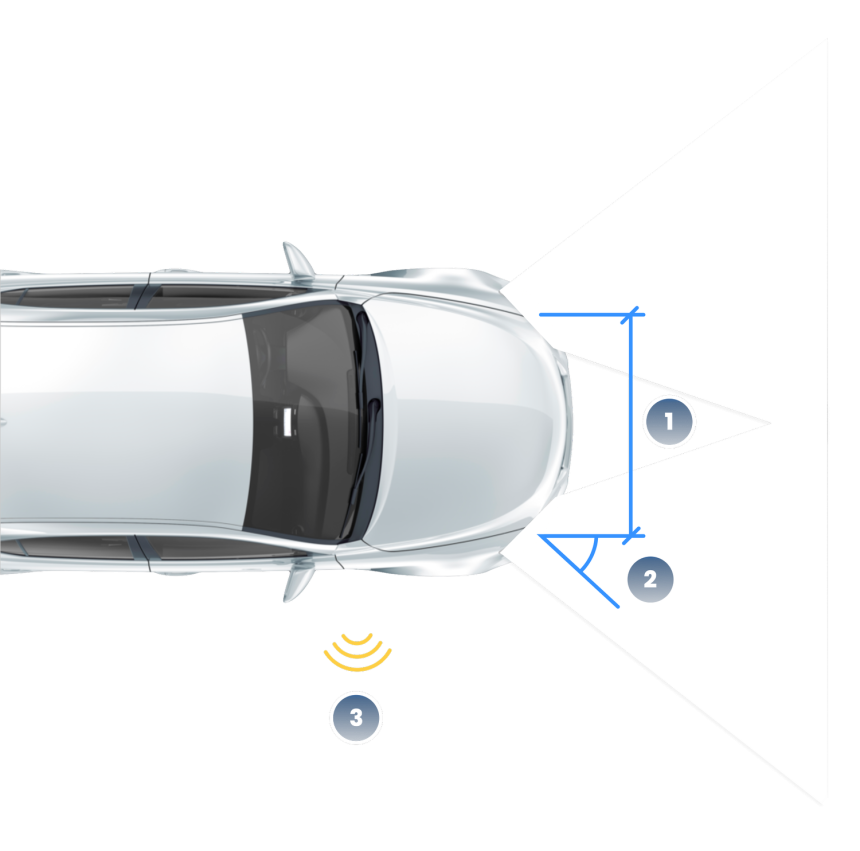
In Europe, recent updates to the European Automated Lane Keep Assist (ALKS) regulations have increased the acceptable speed of an automated vehicle from 64 kph (40 mph) to 130 kph (81 mph), with the requirement that vehicles must be able to detect a 10-centimeter object at 150 meters while traveling at this speed.
NODAR Hammerhead is able to detect and track a 10-centimeter object at a distance of 150 meters while traveling at 130 kph, becoming the first and only 3D sensor to satisfy this new stringent standard. This unique capability is due to NODAR’s exceptionally long-range and accurate 3D depth sensing.

NODAR’s new object detection capability introduces a component to the company’s Hammerhead software-based solution, which utilizes wide-baseline stereo vision cameras and automatic online calibration to provide highly accurate, ultra-long range, real-time depth sensing. The new solution detects and analyzes the road plane while identifying the position, size, and relative velocity of objects, and also tracking those objects frame by frame.
“Our long-range object detection solution greatly enhances the reliability and safety of self-driving vehicles and ADAS,” says Leaf Jiang, NODAR co-founder and CEO. “The combination of untethered stereo cameras, auto calibration, and object detection enables exceptionally precise and reliable depth sensing and scene analysis—even at night and in low-visibility weather conditions—which is why our 3D vision technology outperforms all other 3D sensors today, including lidar. NODAR offers a viable, high-performance, cost-efficient path to mainstream L3 and above passenger vehicles that is available now.”